MATLAB® Test Report
|
Timestamp: |
11-Nov-2025 20:54:56 |
|
Host: |
runnervmw9dnm |
|
Platform: |
glnxa64 |
|
MATLAB Version: |
25.2.0.3042426 (R2025b) Update 1 |
|
Number of Tests: |
12 |
|
Testing Time: |
247.6617 seconds |
|
Overall Result: |
PASSED |
Overview
/home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/
|
147.3678 seconds |
||
|
|
||
|
100.2939 seconds |
||
|
|
||
Details
/home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/
SmokeTests
 SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=DefiningRequirements.mlx
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=DefiningRequirements.mlx
The test passed. Duration: 37.6702 seconds
Event:
Diagnostic logged.
|
Timestamp: 11-Nov-2025 20:51:15 Verbosity: Terse Logged Diagnostic: Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_8d2346eb-1e3f-492d-a6e4-b7ef2ecf3f9e.png
Event Location: SmokeTests[Project=matlab.project.Project]/SmokeRun(File=DefiningRequirements.mlx) Stack: In /home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/SmokeTests.m (SmokeTests.SmokeRun) at 94 |
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntegrationAndTest.mlx
The test passed. Duration: 82.6873 seconds
Event:
Diagnostic logged.
|
Timestamp: 11-Nov-2025 20:52:40 Verbosity: Terse Logged Diagnostic: Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_252f0c28-fbe9-48f6-97d5-6836487a182e.png
Event Location: SmokeTests[Project=matlab.project.Project]/SmokeRun(File=IntegrationAndTest.mlx) Stack: In /home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/SmokeTests.m (SmokeTests.SmokeRun) at 94 |
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntroToProblemSolving.mlx
The test passed. Duration: 5.4336 seconds
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=SystemsDecomposition.mlx
The test passed. Duration: 21.5766 seconds
(Overview)
SolnSmokeTests
ExistSolns
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=DefiningRequirements.mlx
The test passed. Duration: 0.1432 seconds
(Overview)
ExistSolns
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntegrationAndTest.mlx
The test passed. Duration: 0.0077 seconds
(Overview)
ExistSolns
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntroToProblemSolving.mlx
The test passed. Duration: 0.0072 seconds
(Overview)
ExistSolns
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=SystemsDecomposition.mlx
The test passed. Duration: 0.0086 seconds
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=DefiningRequirements.mlx
The test passed. Duration: 16.3496 seconds
Event:
Diagnostic logged.
|
Timestamp: 11-Nov-2025 20:53:24 Verbosity: Terse Logged Diagnostic: Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_e05036ad-bbd9-466f-aec2-732d7ddb3f19.png
Event Location: SolnSmokeTests[Project=matlab.project.Project]/SmokeRun(File=DefiningRequirements.mlx) Stack: In /home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/SolnSmokeTests.m (SolnSmokeTests.SmokeRun) at 110 |
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntegrationAndTest.mlx
The test passed. Duration: 55.6785 seconds
Event:
Diagnostic logged.
|
Timestamp: 11-Nov-2025 20:54:21 Verbosity: Terse Logged Diagnostic: Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_a9062737-3199-4c2e-a501-cc446f0c0b7b.png
Event Location: SolnSmokeTests[Project=matlab.project.Project]/SmokeRun(File=IntegrationAndTest.mlx) Stack: In /home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/SolnSmokeTests.m (SolnSmokeTests.SmokeRun) at 110 |
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=IntroToProblemSolving.mlx
The test passed. Duration: 10.9054 seconds
Event:
Diagnostic logged.
|
Timestamp: 11-Nov-2025 20:54:28 Verbosity: Terse Logged Diagnostic: Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_dd44cfd4-d981-43e2-a0f4-590120219c22.png
Event Location: SolnSmokeTests[Project=matlab.project.Project]/SmokeRun(File=IntroToProblemSolving.mlx) Stack: In /home/runner/work/Engineering-Problem-Solving/Engineering-Problem-Solving/SoftwareTests/SolnSmokeTests.m (SolnSmokeTests.SmokeRun) at 110 |
(Overview)
SmokeRun
Class Setup Parameters: Project=matlab.project.Project
Test Parameters: File=SystemsDecomposition.mlx
The test passed. Duration: 17.1937 seconds
(Overview)
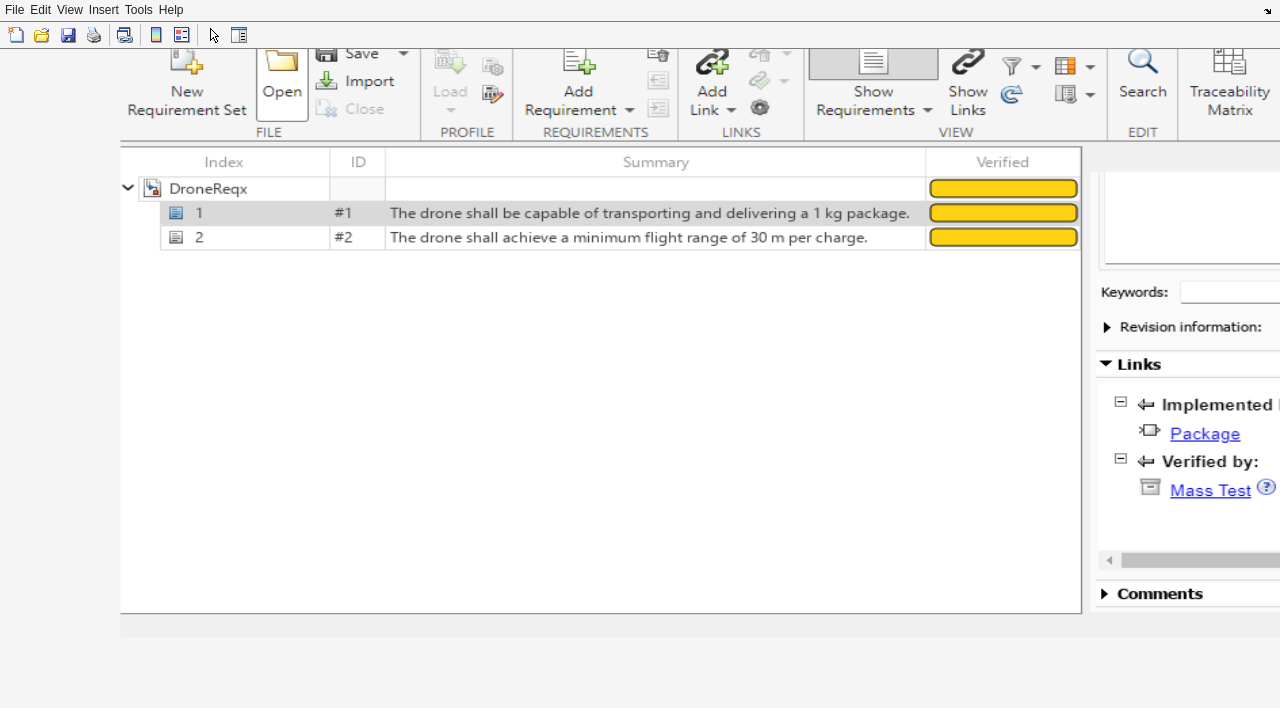
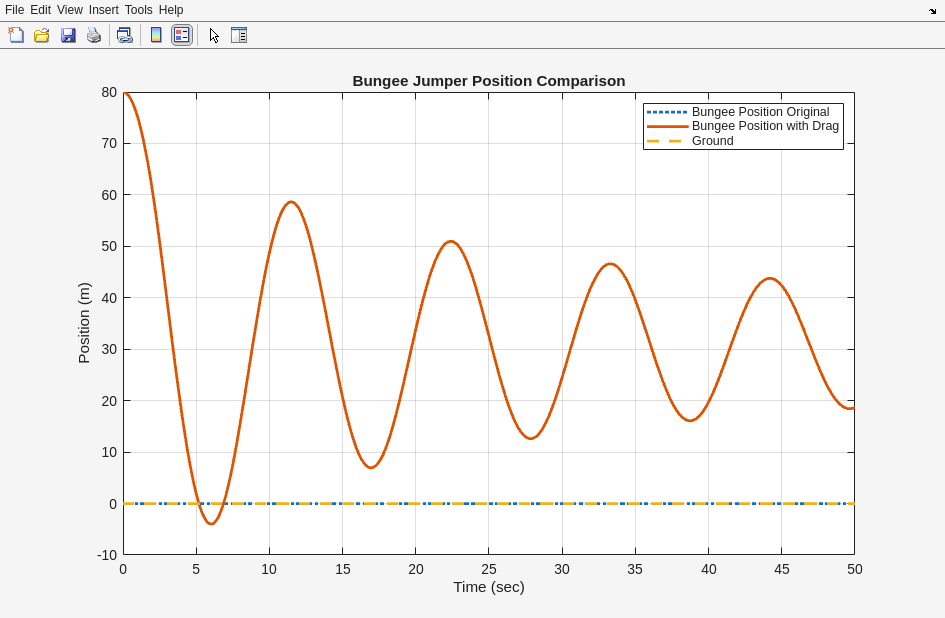
Command Window Text
Running SmokeTests >> Running DefiningRequirements.mlx As part of Heat&Cold Corp., a leading HVAC design and manufacturing company, we are tasked with developing an innovative and cost-effective HVAC system that significantly reduces energy consumption in households. Our goal is to achieve a 20% reduction in energy usage to minimize the carbon footprint of our latest unit while maintaining or enhancing indoor air quality and comfort levels. To ensure affordability, the price of the new unit should not exceed a 5% increase over the previous generation. The HVAC system shall be cost-effective and energy efficient while providing the same/better air quality and comfort. Please select an answer! Please select an answer! [Warning: Parameters updated! Please return to the Test Browser and run the Bungee Test Suite again. Then check the results!] [> In DefiningRequirements (line 101) In run (line 112) In SmokeTests/SmokeRun (line 78)] [Terse] Diagnostic logged (2025-11-11 20:51:15): Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_8d2346eb-1e3f-492d-a6e4-b7ef2ecf3f9e.png .>> Running IntegrationAndTest.mlx Please make a selection. Please make a selection. The model is currently running different scenarios. Please be patient as the data prints out... The model is simulating 1 engine running. The battery charge falls to 4% at 30 minutes into the mission. The model is simulating 2 engines running. The battery charge falls to 1% at 30 minutes into the mission. The model is simulating 3 engines running. The battery charge falls to 0% at 26 minutes into the mission. The model is simulating 4 engines running. The battery charge falls to 0% at 22 minutes into the mission. [Warning: The comparison plot shows the model with the data table has the quadcopter descending faster than the model with the physical components. From another perspective, the descent of the quadcopter takes longer with the physical component representation. This may seem trivial until you take remaining battery charge or planning a descent profile for a delivery into consideration.] [> In IntegrationAndTest (line 146) In run (line 112) In SmokeTests/SmokeRun (line 78)] data = 10×8 timetable Timestamps WindDirectionNorth0Degrees WindSpeedmph Humidity TemperatureF RainInchesminute PressureHg PowerLevelV LightIntensity ____________________ __________________________ ____________ ________ ____________ ________________ __________ ___________ ______________ 29-Sep-2025 15:40:01 267 2.1 0 0.1 0 0 0 0 29-Sep-2025 15:41:01 251 2.2 0 0.1 0 0 0 0 29-Sep-2025 15:42:01 227 0.4 0 0.1 0 0 0 0 29-Sep-2025 15:43:01 187 1.7 0 0.1 0 0 0 0 29-Sep-2025 15:44:01 187 0.7 0 0.1 0 0 0 0 29-Sep-2025 15:45:01 177 1.8 0 0.1 0 0 0 0 29-Sep-2025 15:46:01 170 1.4 0 0.1 0 0 0 0 29-Sep-2025 15:47:01 180 3.5 0 0.1 0 0 0 0 29-Sep-2025 15:48:01 180 3 0 0.1 0 0 0 0 29-Sep-2025 15:49:01 164 2.4 0 0.1 0 0 0 0 windData = 2.1000 2.2000 0.4000 1.7000 0.7000 1.8000 1.4000 3.5000 3.0000 2.4000 Well done! All product level tests have passed and you have successfully validated your design! [Warning: Please enter an answer before submission.] [> In IntegrationAndTest>exerciseSol5 (line 333) In IntegrationAndTest (line 221) In run (line 112) In SmokeTests/SmokeRun (line 78)] Please make a selection. [Terse] Diagnostic logged (2025-11-11 20:52:40): Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_252f0c28-fbe9-48f6-97d5-6836487a182e.png .>> Running IntroToProblemSolving.mlx Please select all that apply! Please select all that apply! ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj Please select all that apply! .>> Running SystemsDecomposition.mlx Please select all that apply! ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj ... Opening Data/FCSHoverTests.mldatx [Warning: Please check the test browser results to ensure all of the tests have passed.] [> In SystemsDecomposition (line 56) In run (line 112) In SmokeTests/SmokeRun (line 78)] [Warning: Model parameters have been updated to match the component level requirements! The model is now running. Please recheck the results!] [> In SystemsDecomposition (line 65) In run (line 112) In SmokeTests/SmokeRun (line 78)] [Warning: This model is configured to use Arduino Due hardware board, but support for that hardware is not installed. To install support for Arduino Due hardware board: 1. Close the model. 2. Open Add-On Explorer. 3. Install support for Arduino Due hardware board. To configure the model for different hardware board: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter for your hardware. To configure the model not to use any hardware: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter to 'None'.] [> In codertarget.updateExtension In SystemsDecomposition (line 105) In run (line 112) In SmokeTests/SmokeRun (line 78)] [Warning: This model is configured to use Arduino Due hardware board, but support for that hardware is not installed. To install support for Arduino Due hardware board: 1. Close the model. 2. Open Add-On Explorer. 3. Install support for Arduino Due hardware board. To configure the model for different hardware board: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter for your hardware. To configure the model not to use any hardware: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter to 'None'.] [> In codertarget.updateExtension In configset.ert.update In Simulink.ERTTargetCC/update In SystemsDecomposition (line 105) In run (line 112) In SmokeTests/SmokeRun (line 78)] [Warning: Cannot find library called 'arduinolib'. To use this library, install <a href="matlab:matlab.internal.addons.launchers.showExplorer('AO_MODEL_RP','identifier','ARDUINO')">Simulink Support Package for Arduino Hardware</a>.] [> In SystemsDecomposition (line 105) In run (line 112) In SmokeTests/SmokeRun (line 78)] . Done SmokeTests __________ Running SolnSmokeTests ....>> Running DefiningRequirementsSoln.mlx Correct! What and why are the primary concerns at the beginning stage of problem solving. What problem are we trying to solve, and why are we trying to solve it? As part of Heat&Cold Corp., a leading HVAC design and manufacturing company, we are tasked with developing an innovative and cost-effective HVAC system that significantly reduces energy consumption in households. Our goal is to achieve a 20% reduction in energy usage to minimize the carbon footprint of our latest unit while maintaining or enhancing indoor air quality and comfort levels. To ensure affordability, the price of the new unit should not exceed a 5% increase over the previous generation. Correct! The problem to be solved is developing a cost-effective HVAC system. Correct! The reason behind solving the problem is in support of reducing energy consumption. The HVAC system shall be cost-effective and energy efficient while providing the same/better air quality and comfort. Correct! This requirement is desired because it can add value if the cost is lower than what the market is currently offering for comparable HVAC systems. Correct! The keyword used is shall. Linking parent (high-level) requirements is not firm. If all of the child (low-level) requirements are met under a parent requirement, that parent requirement is satisfied and does not need to be linked directly. ... Opening Data/BungeeTestsBase.mldatx [Warning: Parameters updated! Please return to the Test Browser and run the Bungee Test Suite again. Then check the results!] [> In DefiningRequirementsSoln (line 101) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] [Warning: Oh no! We have a problem in our bungee jumping system design! Under these constraints, the bungee jumper will make contact with the ground after the initial jump!] [> In DefiningRequirementsSoln (line 123) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] ... Opening Data/BungeeTestsNew.mldatx Correct! This requirement best encompasses the request of the regulatory standard. Correct! This test criterion satisfies the previous requirement. [Terse] Diagnostic logged (2025-11-11 20:53:24): Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_e05036ad-bbd9-466f-aec2-732d7ddb3f19.png .>> Running IntegrationAndTestSoln.mlx Correct! The goal is to combine components and systems into one functional system. Correct! Propulsion and Power Management would be reasonable systems to integrate with the FCS next. The model is currently running different scenarios. Please be patient as the data prints out... The model is simulating 1 engine running. The battery charge falls to 4% at 30 minutes into the mission. The model is simulating 2 engines running. The battery charge falls to 1% at 30 minutes into the mission. The model is simulating 3 engines running. The battery charge falls to 0% at 26 minutes into the mission. The model is simulating 4 engines running. The battery charge falls to 0% at 22 minutes into the mission. [Warning: The comparison plot shows the model with the data table has the quadcopter descending faster than the model with the physical components. From another perspective, the descent of the quadcopter takes longer with the physical component representation. This may seem trivial until you take remaining battery charge or planning a descent profile for a delivery into consideration.] [> In IntegrationAndTestSoln (line 146) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] data = 10×8 timetable Timestamps WindDirectionNorth0Degrees WindSpeedmph Humidity TemperatureF RainInchesminute PressureHg PowerLevelV LightIntensity ____________________ __________________________ ____________ ________ ____________ ________________ __________ ___________ ______________ 29-Sep-2025 15:40:01 267 2.1 0 0.1 0 0 0 0 29-Sep-2025 15:41:01 251 2.2 0 0.1 0 0 0 0 29-Sep-2025 15:42:01 227 0.4 0 0.1 0 0 0 0 29-Sep-2025 15:43:01 187 1.7 0 0.1 0 0 0 0 29-Sep-2025 15:44:01 187 0.7 0 0.1 0 0 0 0 29-Sep-2025 15:45:01 177 1.8 0 0.1 0 0 0 0 29-Sep-2025 15:46:01 170 1.4 0 0.1 0 0 0 0 29-Sep-2025 15:47:01 180 3.5 0 0.1 0 0 0 0 29-Sep-2025 15:48:01 180 3 0 0.1 0 0 0 0 29-Sep-2025 15:49:01 164 2.4 0 0.1 0 0 0 0 windData = 2.1000 2.2000 0.4000 1.7000 0.7000 1.8000 1.4000 3.5000 3.0000 2.4000 Correct! Because wind speed is part of natural air flow, drag is the most reasonable representation of wind speed. Well done! All product level tests have passed and you have successfully validated your design! Correct! This satisfies the requirement for mass. Correct! This satisfies the requirement for range. Correct! These are all benefits that the drone digital twin model can achieve. [Terse] Diagnostic logged (2025-11-11 20:54:21): Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_a9062737-3199-4c2e-a501-cc446f0c0b7b.png .>> Running IntroToProblemSolvingSoln.mlx Correct! These are all examples of systems that can affect and/or be affected by the ocean. Correct! Learning to ask the right questions will provide you with the best insight for understand the layers of solving a problem. Correct! Air drag or air resistance is an additional factor that could be added to increase model precision. ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj [Warning: Please run your constructed mass-spring-damper model prior to checking this box.] [> In IntroToProblemSolvingSoln (line 82) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] [Terse] Diagnostic logged (2025-11-11 20:54:28): Figure saved to: --> /tmp/7558496d-65c4-48d6-87f8-c0f72414a12a/Figure_dd44cfd4-d981-43e2-a0f4-590120219c22.png .>> Running SystemsDecompositionSoln.mlx Correct! These are all examples of components that make up the Bungee Cord system. ... Opening https://matlab.mathworks.com/open/github/v1?repo=mathworks/Quadcopter-Drone-Model-Simscape&project=Quadcopter_Drone.prj Correct! ... Opening Data/FCSHoverTests.mldatx [Warning: Please check the test browser results to ensure all of the tests have passed.] [> In SystemsDecompositionSoln (line 56) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] Correct! The model parameters for mass and gravity were not per the requirements specified for the component (FCS software). [Warning: Model parameters have been updated to match the component level requirements! The model is now running. Please recheck the results!] [> In SystemsDecompositionSoln (line 65) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] Yes, mostly! Cost and weight are well within bounds and power density is right on the cusp of acceptable. Power requirements in the design may be a bit easier to adjust compared to staying within tight weight targets, which gives this option the edge. ... Opening https://github.com/MathWorks-Teaching-Resources/Engineering-Problem-Solving/wiki/Flight-Control-Simulink-Code-Generation [Warning: This model is configured to use Arduino Due hardware board, but support for that hardware is not installed. To install support for Arduino Due hardware board: 1. Close the model. 2. Open Add-On Explorer. 3. Install support for Arduino Due hardware board. To configure the model for different hardware board: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter for your hardware. To configure the model not to use any hardware: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter to 'None'.] [> In codertarget.updateExtension In SystemsDecompositionSoln (line 105) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] [Warning: This model is configured to use Arduino Due hardware board, but support for that hardware is not installed. To install support for Arduino Due hardware board: 1. Close the model. 2. Open Add-On Explorer. 3. Install support for Arduino Due hardware board. To configure the model for different hardware board: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter for your hardware. To configure the model not to use any hardware: 1. Open the model Configuration Parameters and select the Hardware Implementation pane. 2. Set the Hardware board parameter to 'None'.] [> In codertarget.updateExtension In configset.ert.update In Simulink.ERTTargetCC/update In SystemsDecompositionSoln (line 105) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] [Warning: Cannot find library called 'arduinolib'. To use this library, install <a href="matlab:matlab.internal.addons.launchers.showExplorer('AO_MODEL_RP','identifier','ARDUINO')">Simulink Support Package for Arduino Hardware</a>.] [> In SystemsDecompositionSoln (line 105) In run (line 112) In SolnSmokeTests/SmokeRun (line 94)] ... Opening https://github.com/MathWorks-Teaching-Resources/Engineering-Problem-Solving/wiki/Flight-Control-Simulink-Hardware-Deployment . Done SolnSmokeTests __________